ROS C++ echo 구현 - 1
2019. 10. 21. 19:31ㆍ드론
https://github.com/robotpilot/ros-seminar 자료를 참조했다
$ cs
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp message_generation
#include <sstream>
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char *argv[])
{
ros::init(argc, argv, "hello_world_node");
ros::NodeHandle nh;
ros::Publisher chatter_pub = nh.advertise<std_msgs::String>("say_hello_world", 1000);
ros::Rate loop_rate(10);
int count = 0;
while(ros::ok()) {
std_msgs::String msg;
std::stringstream ss;
ss << "hello world! " << count;
msg.data = ss.str();
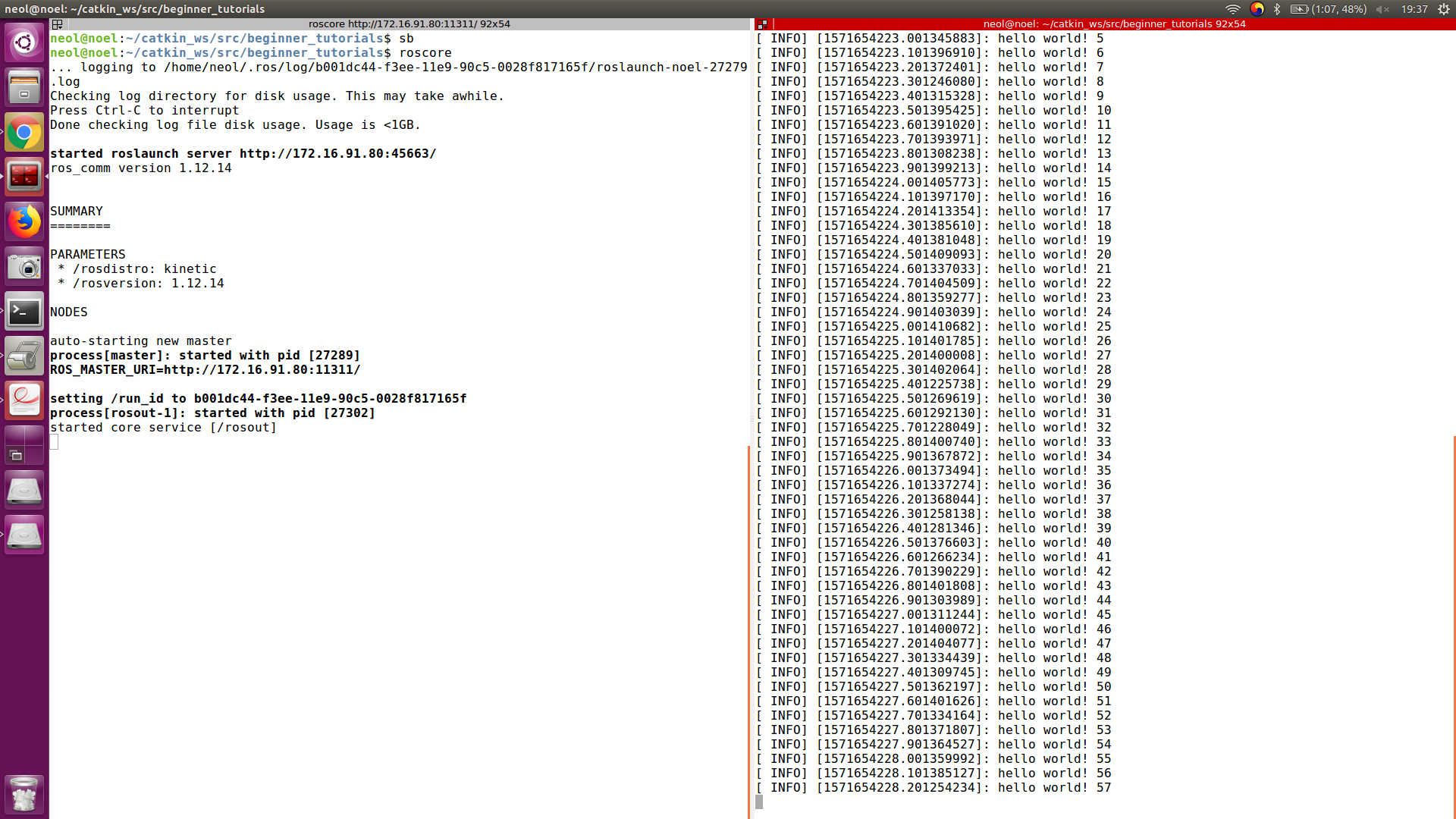
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
$ cm
$ sb
$ rospack profile
'드론' 카테고리의 다른 글
| ROS rosbag으로 turtlesim 재생하기 (0) | 2019.10.22 |
|---|---|
| ROS package.xml, CMakelist 구성 (0) | 2019.10.21 |
| ROS bebop2 2D find-object (0) | 2019.10.21 |
| git push 계정 로그인 생략 (0) | 2019.10.09 |
| git clone --recursive 옵션의 의미 (0) | 2019.10.09 |