tcp bind 에러 원인과 해결법과 SO_REUSEADDR
2019. 7. 22. 19:56ㆍ드론
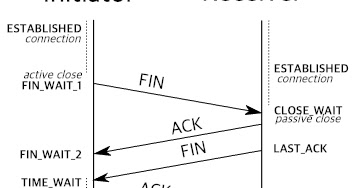
TIME_WAIT는 연결이 중심이 되는 TCP에서 끊어진 연결과 새로운 연결을 구분짓기 위해서(데이터 무결성을 위해) 생겨났다. 소켓이 닫힌 후 일정 시간 동안 커널에서 해당 포트 바인드를 막음으로써 위와 같은 문제를 해결할 수 있다
약 90초 동안의 TIME_WAIT 시간을 가져서 bind를 막게 되는데, UNIX에서는 이 시간을 건드리지 말라고 한다. 하지만 복잡하지 않는 TCP 소스코드라면 소켓 설정을 달리해서 bind 에러를 막을 수 있다
int setsockopt(int sockfd, int level, int optname, const void *optval, socklen_t optlen);
level은 소켓, IP, TCP 레벨이 있으며, optname에 SO_REUSEADDR을 지정해 주면 같은 포트에 대해 다른 소켓이 bind()되는 것을 허락해 주기 때문에 bind()에러 없이 프로그램을 실행할 수 있다. 그리고 setsockopt에서는 optval에 옵션 값을 넣어주는데 실행을 시킬 것이기 때문에 1을 넣어서 전달하면 된다
'드론' 카테고리의 다른 글
| socket 함수의 3번째 인자 (0) | 2019.07.23 |
|---|---|
| send/recv partial Error 방지하는 법 (0) | 2019.07.23 |
| SOCK_DGRAM은 read/write 사용할 수 없는 이유 (0) | 2019.07.22 |
| 동작 중인 포트 조회해서 지우기 (0) | 2019.07.22 |
| TCP 네트워크 프로그래밍 - 1 (0) | 2019.07.22 |