YOLO 실행하기
2019. 10. 1. 00:24ㆍ드론
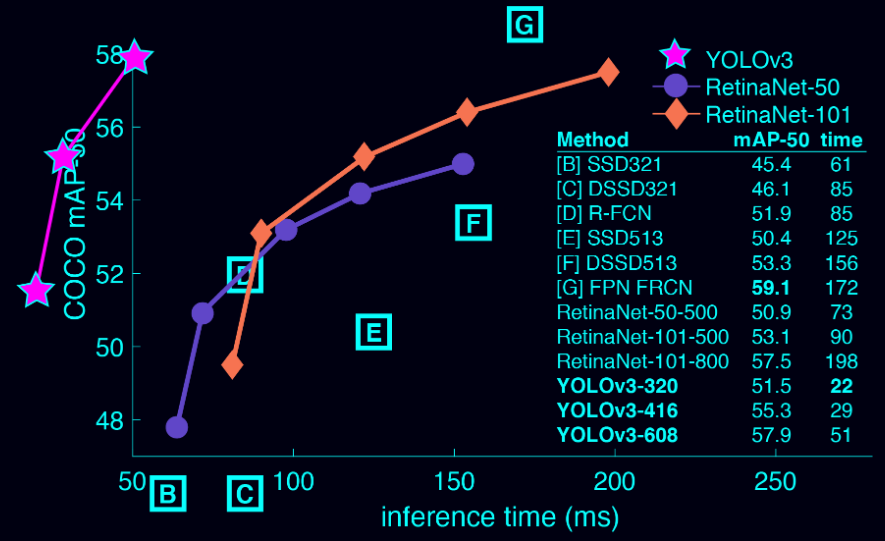
YOLO는 you only look once의 약자로 최신식, 실시간성을 모두 갖춘 detection system이다. 다른 Detectors과 비교해도 극도로 빠르고 정확하다는 특징이 있다. 게다가 사이즈를 바꾸는데 있어서도 수정 없이 쉽게 속도와 정확성을 유지할 수 있다는 점이 특징이다.
$ cd ~/darknet
$ wget https://pjreddie.com/media/files/yolov3.weights
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
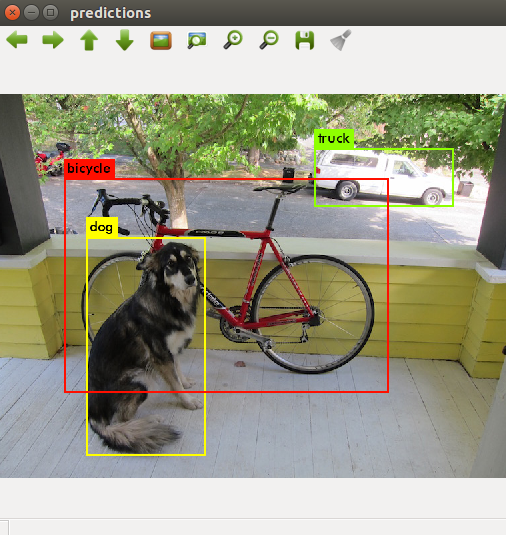
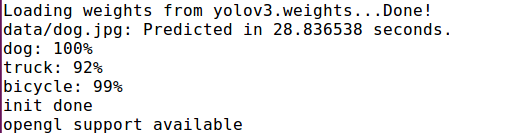
다음과 같이 Darknet은 탐지한 물체와 신뢰도 그리고 걸린 시간을 출력한다. Opencv로 컴파일하지 않았기 때문에 실시간으로 컴파일하지는 않았다. 그래서 이는 predictions.png에 저장되어 있다. 우리는 CPU로 Darknet을 사용하기 때문에 이미지당 약 6~12초가 걸린다. 만일 GPU를 사용한다면 보다 빠를 것이다.
이미지를 입력받아 다수의 이미지를 출력할 수 있다. 하나의 이미지 실행 후 창을 닫고 난 후 다시 입력받을 수 있다
$ ./darknet detect cfg/yolov3.cfg yolov3.weights
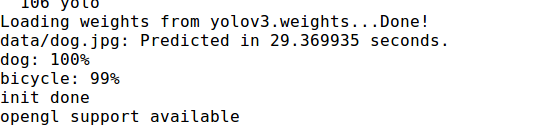
또한 Detection Threshold 값을 달리줘서 높은 신뢰도를 가진 detection만을 추출할 수 있다. 기본은 0.25 혹은 그 이상으로 설정되어 있다
$ ./darknet detect cfg/yolov3.cfg yolov3.weights
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg -thresh 0.99
기본 설정파일만 담은 yolo-tiny을 설치할 수 있다
$ cd ~/darknet/cfg
$ wget https://pjreddie.com/media/files/yolov3-tiny.weights
$ cd ../
$ mv cfg/yolov3-tiny.weights .
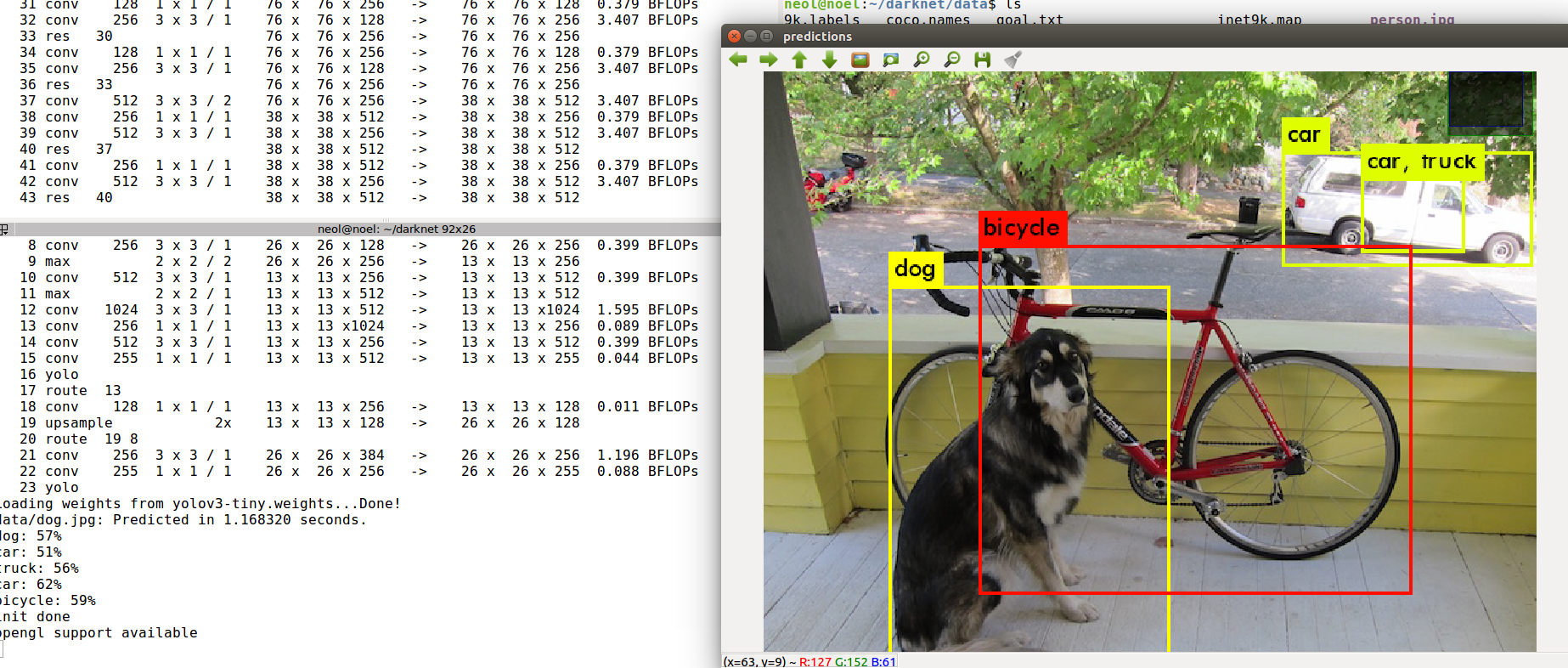
$ ./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/dog.jpg
가중치 파일이 매우 작기 때문에, 정확하지는 않지만 매우 빠른시간 안에 detection이 가능하다
'드론' 카테고리의 다른 글
| Git 개요 (0) | 2019.10.01 |
|---|---|
| ROS bebop2 installation (0) | 2019.10.01 |
| ubuntu 16.04 YOLO 설치 (0) | 2019.09.30 |
| ROS tf_remap debug (0) | 2019.09.27 |
| ROS remap (0) | 2019.09.26 |