ROS TurtleBot Follower Demo -1
2019. 9. 24. 22:22ㆍ드론
2개 이상의 터틀봇을 이용해서 사람을 따라 다니는 TurtleBot Follower Demo를 작성하려고 한다. 사전에 필요한 패키지를 설치하도록 한다. 현재 이 데모는 LDS-01만 사용해서 구현됐다. 분류 알고리즘은 사람의 표본과 장애물 위치에 대한 사전 피팅을 기반으로 사용되어 조치가 된다
$ sudo apt-get install ros-kinetic-ar-track-alvar -y $ sudo apt-get install ros-kinetic-ar-track-alvar-msgs -y $ cs $ git clone https://github.com/ROBOTIS-GIT/turtlebot3_applications.git $ git clone https://github.com/ROBOTIS-GIT/turtlebot3_applications_msgs.git $ cm
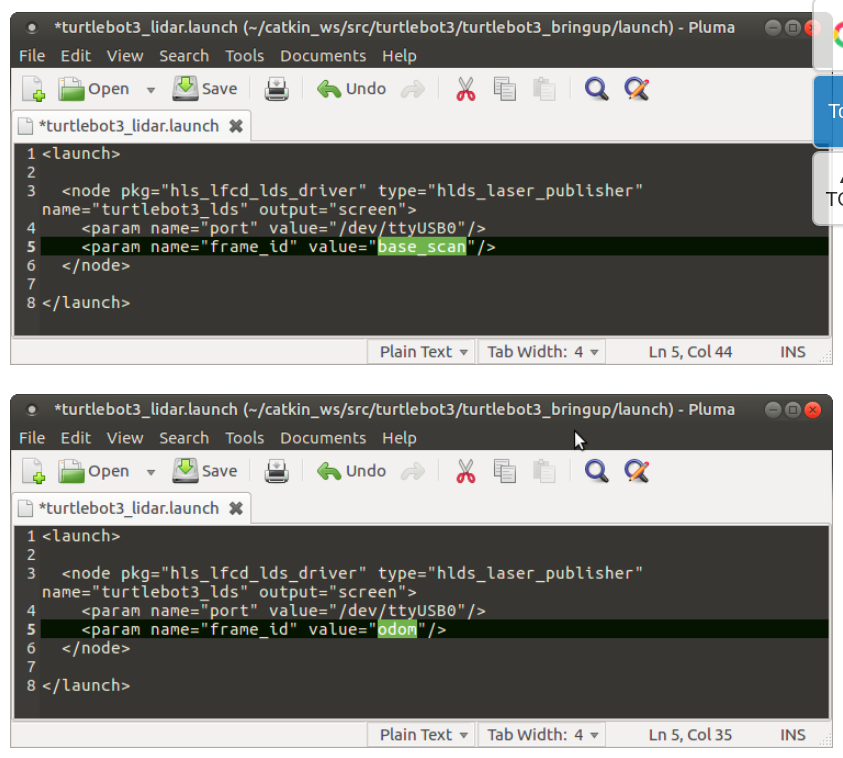
데모를 실행하기 위해서는 LIDAR launch 파일에서 base_scan을 odom으로 수정해야만 한다
$ nano ~/catkin_ws/src/turtlebot3/turtlebot3_bringup/launch/turtlebot3_lidar.launch
원격 PC에서 설치해야 할 패키지가 있다
$ sudo apt-get install python-pip -y $ sudo pip install --upgrade pip $ sudo pip install -U scikit-learn numpy scipy $ sudo apt-get install python-sklearn python3-sklearn -y
사전에 원격 PC에서 roscore 후에 터틀봇에서 roslaunch를 해준다
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
그리고 PC에서 터틀봇에서 받은 데이터를 가지고, 필터링 하는 launch 파일을 실행시킨다
$ roslaunch turtlebot3_follow_filter turtlebot3_follow_filter.launch $ roslaunch turtlebot3_follower turtlebot3_follower.launch
한개의 터틀봇을 실행했을 때의 rqt_graph
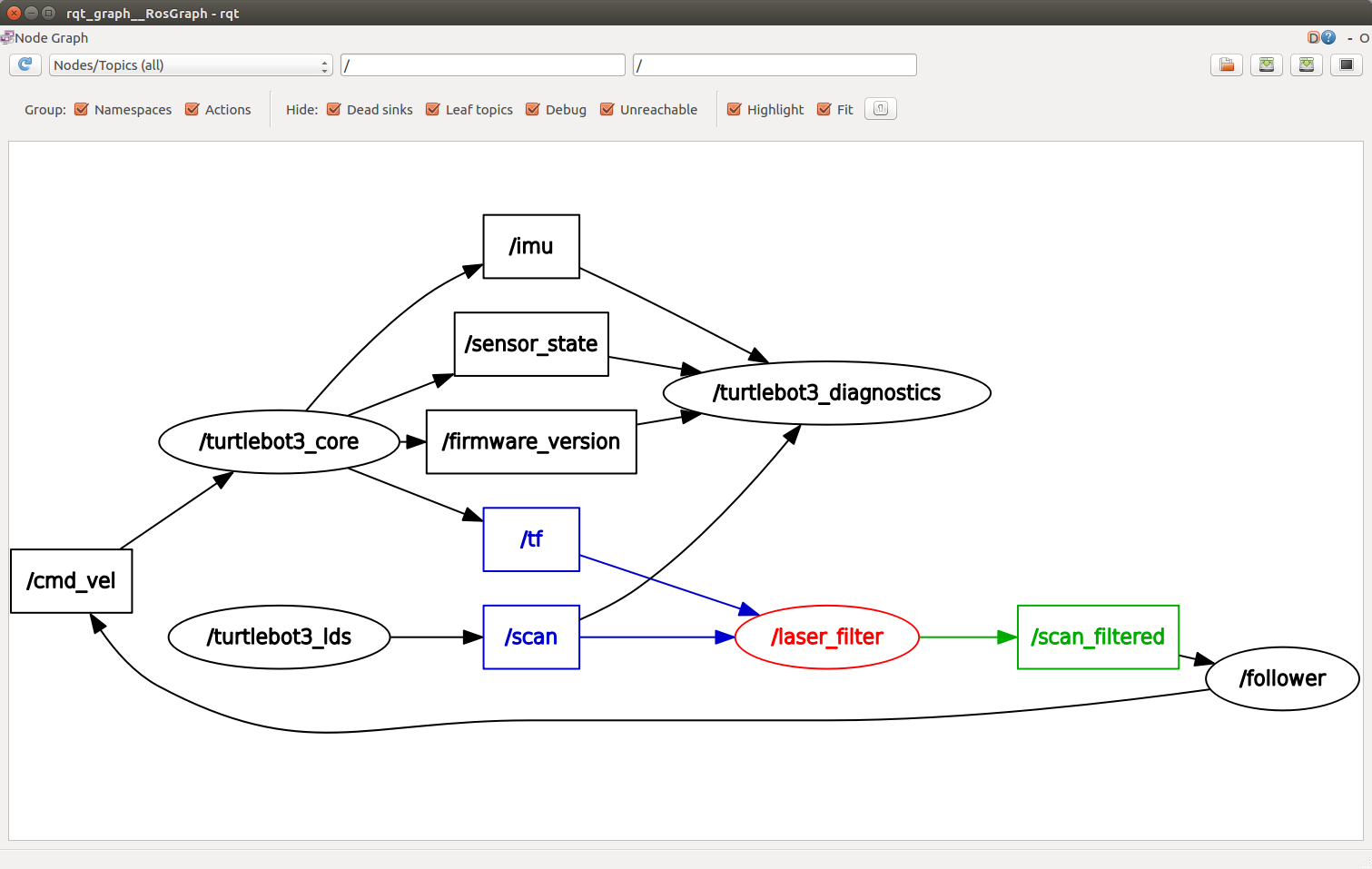
한 개를 실행해서 사람을 추적하는 프로젝트는 위와 같이 실행할 수 있지만, 두 개 이상은 실행이 올바르게 되지 않는다. 왜냐하면 /tf에 대한 토픽 이름이 같기 때문이다. 따라서 launch 파일에 네임스페이스를 부여해서 분리하도록 한다.
다음은 두 개 이상의 터틀봇을 실행한 상태이고, 네임스페이스가 tf를 제외하고는 분리되었지만 아직 tf에 대한 문제는 해결되지 않았다

[출처] http://emanual.robotis.com/docs/en/platform/turtlebot3/applications/#applications
'드론' 카테고리의 다른 글
| ROS tf_remap debug (0) | 2019.09.27 |
|---|---|
| ROS remap (0) | 2019.09.26 |
| ROS 터틀봇에서 topic시 주의할 점 (0) | 2019.09.23 |
| ROS remote action (0) | 2019.09.18 |
| ROS uvc_camera Calibration (4) | 2019.09.17 |