2019. 8. 4. 18:20ㆍ임베디드/ATmega128
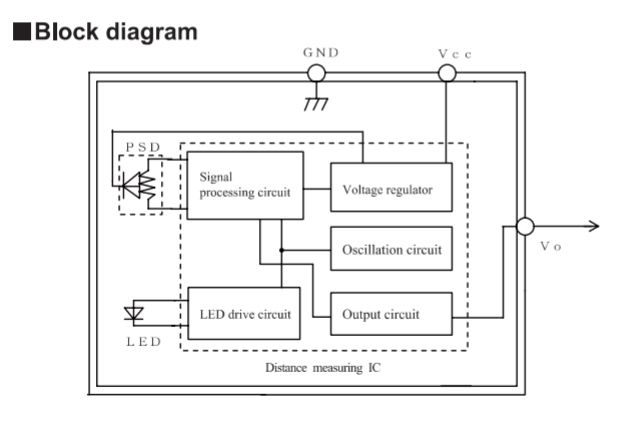
적외선 거리센서의 구동원리는 적외선을 발광하여 반사물에 반사되는 적외선 양에 따라 거리를 측정하며, 측정된 거리만큼 아날로그 전압으로 출력되는 것이다. 거리 측정은 10~80cm로, 10cm 이하는 측정이 되지 않는다. 그리고 반사물의 색상과 반사율에 의한 영향을 크게 받지 않는 것과 초음파 센서와 다르게 값이 잘 튀지 않는 다는 것이 장점이다
실제 데이터시트를 보면 triangulation method를 채택했기 때문에, 거리 감지에 있어서 반사율, 온도 그리고 동작 지속 시간은 영향을 받지 않는다고 나와있다
그리고 측정하는 시간에 대해서 자세하게 알아야 한다. 최대로 50ms당 한 번씩 측정을 해야만 한다

그리고 가장 중요한 거리 환산표다

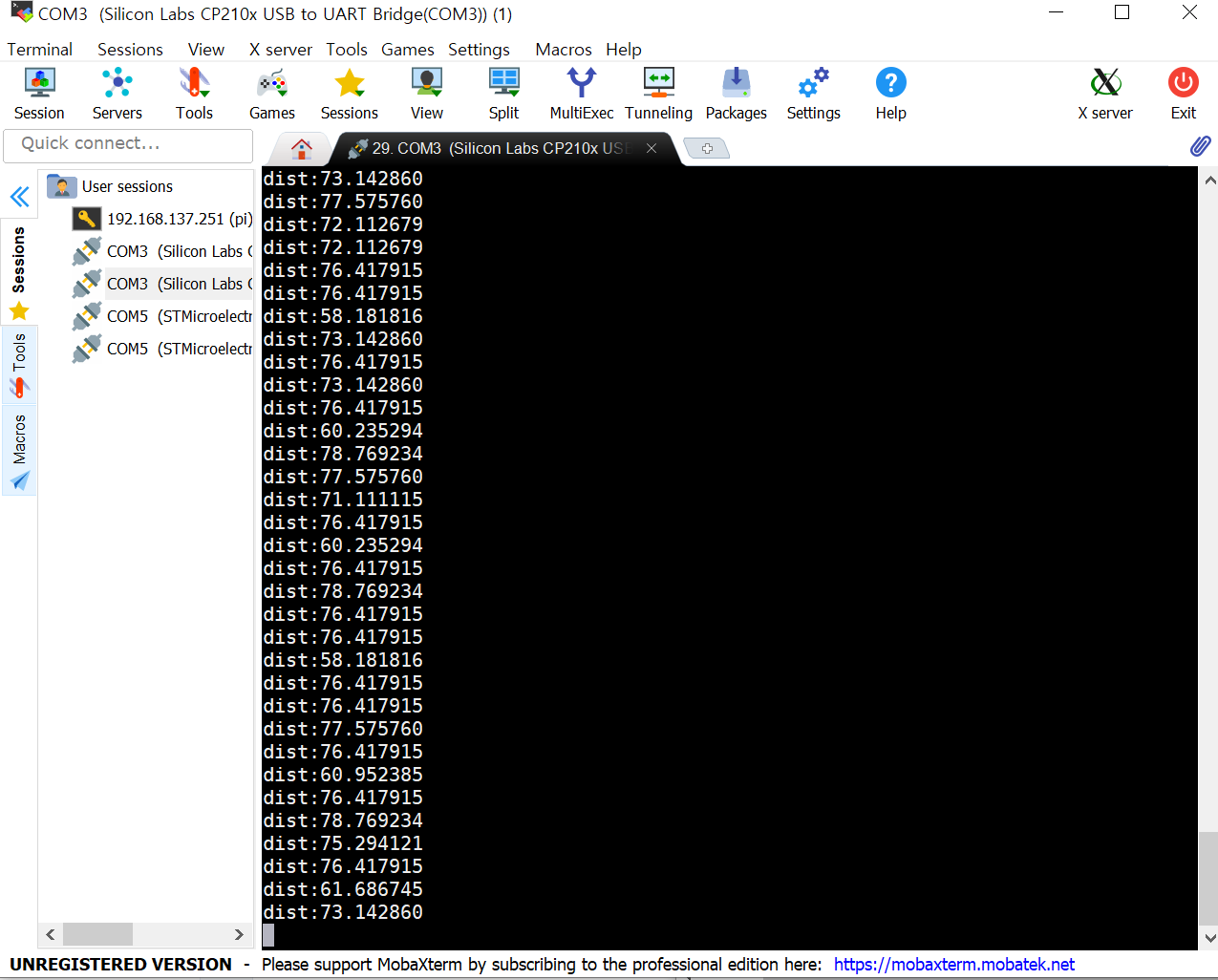
아래 그래프를 역으로 눕혀서 생각해보면 volt가 입력이고, dist가 출력이 된다. 따라서 대충 1을 기준으로 맞춘다면 0.04*volt가 출력인 y가 된다. 이를 뒤집는다면 실제 거리가 구해질 것이다
깃허브주소: https://github.com/surinoel/avr/tree/master/adc/SHARP_2Y0A21/SHARP_2Y0A21
'임베디드 > ATmega128' 카테고리의 다른 글
| ATmega128 tiny RTC 제어하기 -2 (0) | 2019.08.11 |
|---|---|
| ATmega128 tiny RTC 제어하기 -1 (0) | 2019.08.11 |
| Atmel Studio7 prinf float (0) | 2019.08.04 |
| ATmega128 SPI W25Q64 EEPROM 제어하기 -3 (0) | 2019.07.29 |
| ATmega128 SPI W25Q64 EEPROM 제어하기 -2 (0) | 2019.07.29 |